
Hướng dẫn điều khiển động cơ bằng ESP8266
Trước khi làm bước này thì những bạn nên tìm hiểu thêm qua bài viết
http://arduino.vn/bai-viet/1496-esp8266-ket-noi-internet-phan-1-cai-dat-esp8266-lam-mot-socket-client-ket-noi-toi
Sau khi đã đọc xong bài viết trên thì tất cả chúng ta khởi đầu nào
Bạn đang đọc: Hướng dẫn điều khiển động cơ bằng ESP8266
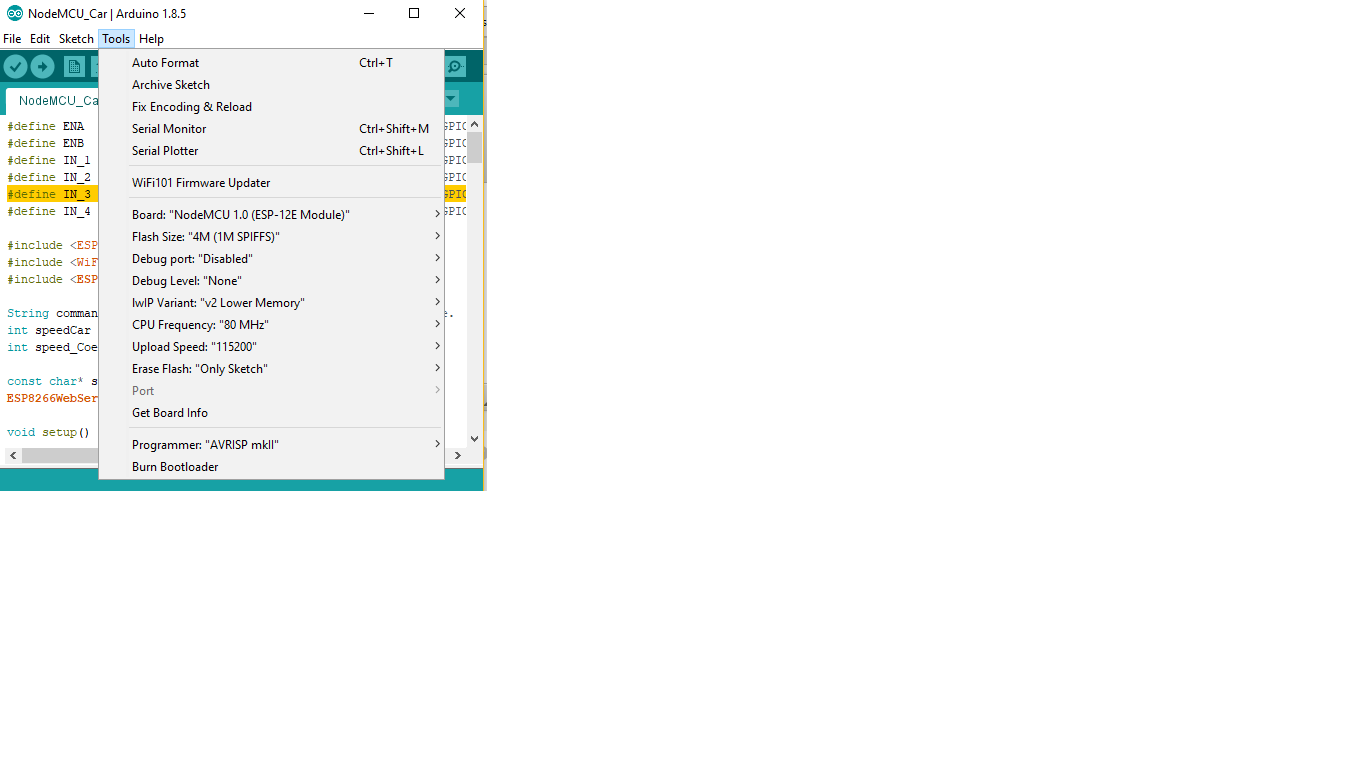
Sau khi điều chỉnh IDE giống như trong hình các bạn chỉ cần copy đoạn code này và nạp cho Esp thôi.
#define ENA 14 // Enable/speed motors Right GPIO14(D5) #define ENB 12 // Enable/speed motors Left GPIO12(D6) #define IN_1 15 // L298N in1 motors Right GPIO15(D8) #define IN_2 13 // L298N in2 motors Right GPIO13(D7) #define IN_3 2 // L298N in3 motors Left GPIO2(D4) #define IN_4 0 // L298N in4 motors Left GPIO0(D3) #include#include #include String command; //String to store app command state. int speedCar = 800; // 400 - 1023. int speed_Coeff = 3; const char* ssid = "NodeMCU Car"; ESP8266WebServer server(80); void setup() { pinMode(ENA, OUTPUT); pinMode(ENB, OUTPUT); pinMode(IN_1, OUTPUT); pinMode(IN_2, OUTPUT); pinMode(IN_3, OUTPUT); pinMode(IN_4, OUTPUT); Serial.begin(115200); // Connecting WiFi WiFi.mode(WIFI_AP); WiFi.softAP(ssid); IPAddress myIP = WiFi.softAPIP(); Serial.print("AP IP address: "); Serial.println(myIP); // Starting WEB-server server.on ( "/", HTTP_handleRoot ); server.onNotFound ( HTTP_handleRoot ); server.begin(); } void goAhead(){ digitalWrite(IN_1, LOW); digitalWrite(IN_2, HIGH); analogWrite(ENA, speedCar); digitalWrite(IN_3, LOW); digitalWrite(IN_4, HIGH); analogWrite(ENB, speedCar); } void goBack(){ digitalWrite(IN_1, HIGH); digitalWrite(IN_2, LOW); analogWrite(ENA, speedCar); digitalWrite(IN_3, HIGH); digitalWrite(IN_4, LOW); analogWrite(ENB, speedCar); } void goRight(){ digitalWrite(IN_1, HIGH); digitalWrite(IN_2, LOW); analogWrite(ENA, speedCar); digitalWrite(IN_3, LOW); digitalWrite(IN_4, HIGH); analogWrite(ENB, speedCar); } void goLeft(){ digitalWrite(IN_1, LOW); digitalWrite(IN_2, HIGH); analogWrite(ENA, speedCar); digitalWrite(IN_3, HIGH); digitalWrite(IN_4, LOW); analogWrite(ENB, speedCar); } void goAheadRight(){ digitalWrite(IN_1, LOW); digitalWrite(IN_2, HIGH); analogWrite(ENA, speedCar/speed_Coeff); digitalWrite(IN_3, LOW); digitalWrite(IN_4, HIGH); analogWrite(ENB, speedCar); } void goAheadLeft(){ digitalWrite(IN_1, LOW); digitalWrite(IN_2, HIGH); analogWrite(ENA, speedCar); digitalWrite(IN_3, LOW); digitalWrite(IN_4, HIGH); analogWrite(ENB, speedCar/speed_Coeff); } void goBackRight(){ digitalWrite(IN_1, HIGH); digitalWrite(IN_2, LOW); analogWrite(ENA, speedCar/speed_Coeff); digitalWrite(IN_3, HIGH); digitalWrite(IN_4, LOW); analogWrite(ENB, speedCar); } void goBackLeft(){ digitalWrite(IN_1, HIGH); digitalWrite(IN_2, LOW); analogWrite(ENA, speedCar); digitalWrite(IN_3, HIGH); digitalWrite(IN_4, LOW); analogWrite(ENB, speedCar/speed_Coeff); } void stopRobot(){ digitalWrite(IN_1, LOW); digitalWrite(IN_2, LOW); analogWrite(ENA, speedCar); digitalWrite(IN_3, LOW); digitalWrite(IN_4, LOW); analogWrite(ENB, speedCar); } void loop() { server.handleClient(); command = server.arg("State"); if (command == "F") goAhead(); else if (command == "B") goBack(); //Các dòng này các bạn có thể điều chỉnh để phù hợp với app điều khiển của mình else if (command == "L") goLeft(); else if (command == "R") goRight(); else if (command == "I") goAheadRight(); else if (command == "G") goAheadLeft(); else if (command == "J") goBackRight(); else if (command == "H") goBackLeft(); else if (command == "0") speedCar = 400; else if (command == "1") speedCar = 470; else if (command == "2") speedCar = 540; else if (command == "3") speedCar = 610; else if (command == "4") speedCar = 680; else if (command == "5") speedCar = 750; else if (command == "6") speedCar = 820; else if (command == "7") speedCar = 890; else if (command == "8") speedCar = 960; else if (command == "9") speedCar = 1023; else if (command == "S") stopRobot(); } void HTTP_handleRoot(void) { if( server.hasArg("State") ){ Serial.println(server.arg("State")); } server.send ( 200, "text/html", "" ); delay(1); }
Sau khi nạp code xong chúng ta mở Serial Monitor để xem địa chỉ IP nhé (Lưu ý sau khi mở Serial Monitor các bạn nhớ ấn nút reset trên esp mới có thể xem được địa chỉ IP)

Source: https://baoduongdieuhoa24h.com
Category: Điện Tử





