Nguyên Tắc Điều Khiển Động Cơ Bước (Step Motor), Mạch Điều Khiển Motor Bước
1. Tìm hiểu khái niệm motor bước
Trước khi tìm hiểu về cách điều khiển động cơ bước, chúng ta cần nắm rõ khái niệm động cơ bước là gì? Đây là 1 loại động cơ có khả năng biến đổi các tín hiệu điều khiển ở dưới dạng các xung điện rời rạc biến thiên kế tiếp nhau trở thành các chuyển động ở góc quay hoặc các chuyển động của roto. Loại động cơ này có khả năng cố định roto của máy vào đúng các vị trí cần thiết.
Động cơ bước giúp cố định roto của máy vào đúng các vị trí cần thiết
Các thông số kỹ thuật cơ bản để chọn được một mạch điều khiển động cơ bước 4 dây thích hợp gồm có :
- Loại motor bao gồm: loại trục, loại lỗ,..
- Momen xoắn dùng để giữ max.
- Dòng điện định mức có các thông số: 0.75A/ pha, 1.4A/ pha, 2.8A/ pha
- Số lượng pha: 2p, 5p
- Kích thước của khung motor bước: 2 (24mm), 4 (42mm), 6 (60mm) và 9 (85mm).
- Chiều dài của motor bước: 3 (33mm), 5 (46.5 – 47mm), 6 (59.5mm) và 9 (98mm).
2. Các đặc tính cơ bản cần nhớ của động cơ bước
a) Đặc tính động của động cơ bước
Đặc tính tốc độ – mô men: Đặc tính này được xác định bởi động cơ cùng với bộ điều khiển, và nó cũng bị ảnh hưởng rất nhiều bởi loại thiết bị điều khiển mà bạn sử dụng.
Đặc tính tải theo quán tính và tần số bắt đầu: Điều này cho thấy tần số khởi động cho phép của động cơ sẽ giảm khi tải quán tính của nó tăng lên. Các giá trị này còn được thay đổi theo tốc độ xung, nhưng động cơ bước vẫn không thể tuân theo tốc độ xung nếu nó vượt quá một điểm nhất định, vì như vậy sẽ dẫn đến việc đi sai bước.
Đặc tính có độ rung: Khi điều khiển vi bước step motor, động cơ bước quay nhưng trên thực tế là thực hiện rất nhiều bước có phản hồi, mỗi bước còn được mô tả bởi các giai đoạn cụ thể, chi tiết.
b) Đặc tính tĩnh của động cơ bước
Đặc tính mômen và góc : Khi điều khiển step motor, mối quan hệ giữa mức độ di dời góc của rôto và mômen sẽ tạo ra lực tính năng lên trục động cơ, trong khi đó, động cơ còn được kích thích bởi một dòng điện định mức .Độ đúng chuẩn của góc : Trong điều kiện kèm theo động cơ chạy không tải, nó sẽ có độ đúng chuẩn của góc trong vào khoảng chừng 0,05 ˚. Độ đúng chuẩn góc của động cơ bước thường thì được bộc lộ bằng độ đúng chuẩn của vị trí dừng .Độ đúng mực của vị trí dừng : điều này biểu lộ sự độc lạ giữa vị trí dừng động cơ theo mong ước và vị trí dừng theo thực tiễn .Trong điều kiện kèm theo trong thực tiễn của mạch điều khiển động cơ bước 6 dây, động cơ bước luôn sống sót ma sát. Nếu tải trọng của ma sát không đổi thì góc di dời sẽ không đổi so với tổng thể mọi hoạt động giải trí một chiều. Tuy nhiên, trong khi hoạt động giải trí hai chiều, sai số góc hoàn toàn có thể tăng lên gấp đôi .
3. Nguyên tắc điều khiển động cơ bước hoạt động như thế nào
Có thể vận dụng quy tắc bàn tay phải để điều khiển động cơ bước như sau : Nắm bàn tay phải, rồi đặt bàn tay sao cho bốn ngón tay hướng theo chiều của dòng điện chạy qua những vòng dây. Khi đó, ngón tay cái choãi ra sẽ chỉ chiều của đường sức từ bên trong lòng ống dây .Nguyên lý hoạt động giải trí cơ bản của motor bước : Khi bạn cấp điện vào trong cuộn dây của stato, cuộn dây này sẽ đóng vai trò chính là một nam châm từ điện. Nó sẽ gây ra lực ảnh hưởng tác động, từ đó làm quay roto .Khi điều khiển động cơ bước 5 dây, quy trình đổi khác thứ tự phân phối điện cho những cuộn dây của stato sẽ khiến cho trình tự quay của roto bị biến hóa. Việc biến hóa thứ tự của quy trình chuyển mạch sẽ địa thế căn cứ vào mạch điện tử .
Có thể vận dụng quy tắc bàn tay phải để điều khiển động cơ bước
4. Sơ đồ và cách điều khiển động cơ bước
Khi nói đến cách điều khiển động cơ bước, những bạn sẽ thường nhắc đến cách mạch điều khiển động cơ bước 6 dây, 4 dây hoặc 5 dây, … Tuy nhiên, ở đây tất cả chúng ta sẽ đi khám phá cụ thể hơn về nền tảng của quy trình điều khiển động cơ bước ra sao, làm như thế nào, sử dụng giải pháp điều khiển gì hiệu suất cao nhất ?Cần biết rằng, mỗi một loại động cơ bước thường thì sẽ có những đặc tuyến khác nhau, thế cho nên cách điều khiển của từng loại cũng sẽ khác nhau. Tùy thuộc vào lực kéo ( mô men lực ) và vận tốc quay nhu yếu của motor bước mà tất cả chúng ta hoàn toàn có thể thiết lập chương trình điều khiển động cơ bước sau đây :
- Trường hợp đối với những động cơ bước chỉ cần chạy ở tốc độ thấp thì chúng ta sử dụng phương pháp điều khiển bằng cách cấp điện áp trực tiếp. Chính nội trở trong cuộn dây của động cơ sẽ sản sinh ra một dòng điện mà ở đó giới hạn dòng điện này sẽ phụ thuộc vào điện áp được cấp trực tiếp vào động cơ bước.
- Trường hợp step motor và mạch điều khiển chạy ở tốc độ cao: Nếu các bạn muốn tiếp tục sử dụng phương pháp cung cấp điện áp trực tiếp vào động cơ bước thì lực kéo (mô men lực) sẽ bị giảm sút nghiêm trọng. Bởi vì đặc tuyến cảm của cuộn dây sẽ tạo ra một lực để kìm hãm khả năng, tác dụng của dòng điện.
- Một thực tế cho thấy là trong cách điều khiển động cơ bước bằng cách cấp điện trực tiếp sẽ khiến cho động cơ và mạch điều khiển động cơ bước rất nóng.
- Trường hợp chúng ta cần cải thiện và nâng cao hiệu suất làm việc của mạch điều khiển motor bước ở tốc độ thấp, đồng thời cần tăng tốc độ cao lên thì nên sử dụng phương pháp điều khiển bằng cách băm xung. Khi điều khiển động cơ bước dựa vào băm xung nhằm duy trì được tần số không đổi. Tùy theo nguyên tắc duy trì dòng điện chạy qua các cuộn dây của động cơ cũng sẽ không đổi cho dù ở mọi cấp độ. Cách điều khiển này còn gọi là phương pháp điều khiển theo dòng điện.
- Thực tế còn cho thấy, cách điều khiển động cơ bước bằng cách băm xung sẽ giúp cho động cơ bước hoạt động mạnh mẽ hơn, êm hơn và đặc biệt là ít nóng hơn.
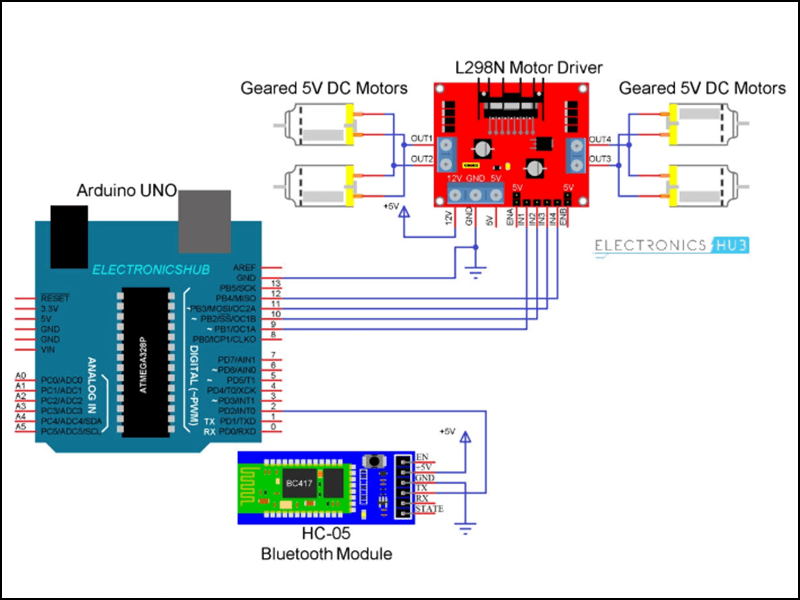
Sơ đồ và cách điều khiển động cơ bước
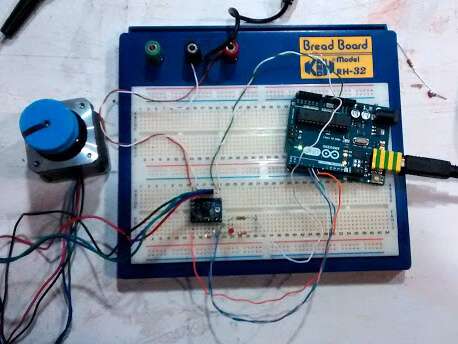
5. Điều khiển động cơ bước dùng Code Arduino và A4988
Để điều khiển động cơ bước Arduino, bạn cần chuẩn bị:
- Động cơ Arduino UNO
- Động cơ NEMA17 Stepper Motor
- A4988 Driver Module
- Tụ điện 47µf (giúp bảo vệ board điều khiển, tránh khỏi các xung điện áp)
- Biến trở
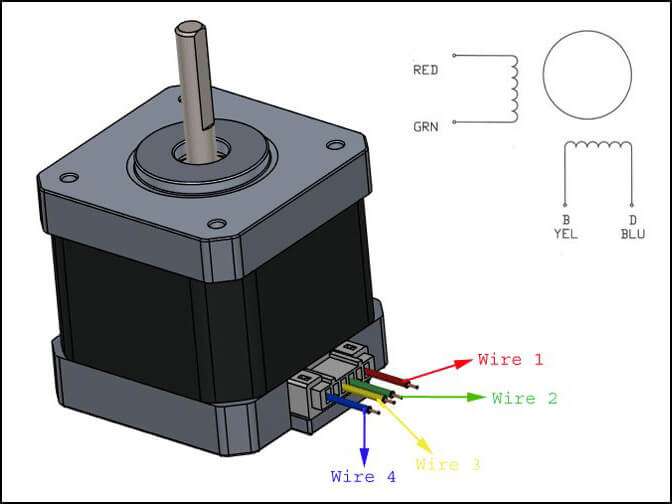
- Động cơ bước NEMA17 có 6 dây
- Động cơ hoạt động ở 12V (<12V thì mô men xoắn của động cơ sẽ giảm)
- Góc bước vào khoảng 1.8 độ và 10 – 40 °C.
Sơ đồ chân của động cơ bước NEMA 17:
- Module điều khiển động cơ bước A4988
- A4988 chính là driver điều khiển động cơ bước có kích thước cực kỳ nhỏ gọn, hỗ trợ được nhiều chế độ làm việc, đồng thời nó còn điều chỉnh được dòng điện ra cho động cơ, đặc biệt tự động ngắt điện khi động cơ quá nóng.
- Công suất điện của ngõ ra: 8 – 35V, 2A
- Có 5 chế độ bao gồm: 1/2, 1/4, 1/8, 1/16 bước
- Điều chỉnh dòng điện đi ra bằng chiết áp
- Tự động ngắt điện khi động cơ bị quá nhiệt
Cách điều khiển động cơ bước:
Có 5 chính sách cho bạn lựa chọn, nếu bạn không muốn mạch điều khiển động cơ bước chạy rất đầy đủ 200 bước / vòng. Tốt nhất, tất cả chúng ta nên chạy cho rất đầy đủ mà không cần chăm sóc đến 3 chân này, sau đó sẽ kiểm soát và điều chỉnh bước của chính động cơ trong mạng lưới hệ thống code .MS1MS2
MS3
Microstep ResolutionLowLowLowFull StepHighLowLow½ Step ( Half Step )LowHighLow¼ Step ( Quarter Step )HighHighLow1/8 Step ( Eighth Step )HighHighHigh1/16 Step ( Sixteenth Step )
- Lựa chọn chế độ full, chế độ 1/ 2 hay 1/ 4 thì sẽ được thông qua 3 pin đó là MS1, MS2, MS3. Lưu ý là nếu các bạn thả nổi 3 pin này tức là bạn chọn chạy theo chế độ full step.
- Bật – tắt động cơ thì bạn chỉ cần thông qua pin ENABLE, nếu chọn mức LOW là bật module, còn mức HIGH tức là tắt module.
- Điều khiển chiều quay của động cơ bước thông qua pin DIR.
- Điều khiển bước của động cơ bằng pin STEP, mỗi xung lại tương ứng với 1 bước hoặc 1 vi bước.
- Chú ý, hai chân Sleep với Reset luôn phải nối với nhau.
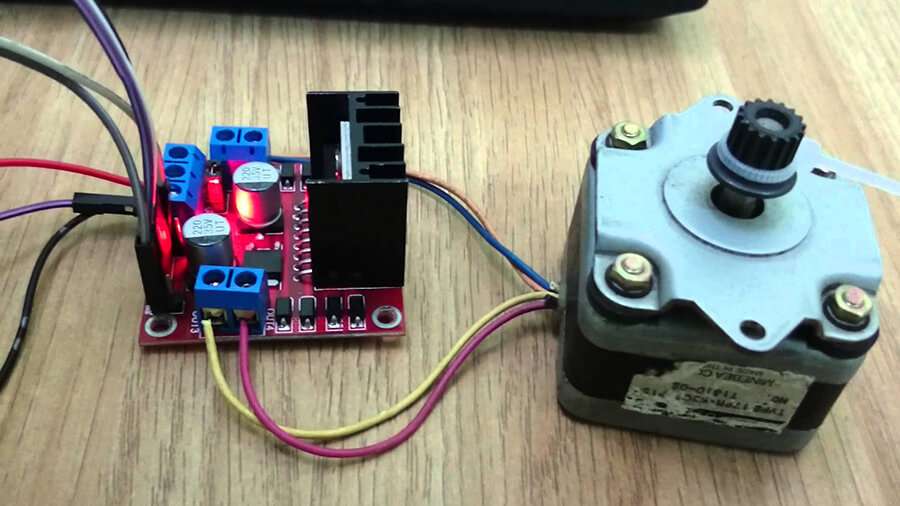
- Cụ thể hơn, cách điều khiển step motor chính là kết nối giữa động cơ Nema 17 và A4988, khi đó chúng ta sẽ tiến hành kết nối theo cặp pha của động cơ bước đến 2 cặp 1A – 1B và cặp 2A – 2B.
- Giữa Arduino và A4988 thì các bạn cần kết nối chúng lại theo đúng sơ đồ chân.
Kết nối theo cặp pha của động cơ bước đến 2 cặp 1A – 1B và cặp 2A – 2B
- Code:
- Các bạn hãy tiến hành nạp code này vào Arduino IDE để thử nghiệm (nhưng hãy nhớ cài đặt cho thư viện động cơ bước nhé)
- Tiếp theo, trong vòng loop, chúng ta hãy tiến hành đọc chân của biến trở để chuyển đổi sao cho mức vặn của biến trở rơi vào trong khoảng từ 0 – 500 là được. So sánh giá trị của chúng khi chỉnh biến trở, trường hợp nếu nó lớn hơn giá trị trước đó (vặn theo chiều kim đồng hồ) thì động cơ sẽ nhanh chóng di chuyển 10 bước, quay theo chiều kim đồng hồ. Nếu giá trị nhận được nhỏ hơn giá trị trước đó (vặn quay ngược kim đồng hồ) thì động cơ sẽ lập tức di chuyển 10 bước theo hướng ngược chiều kim đồng hồ.
Kết luận
Thông qua bài viết trên đây, chúng tôi đã ra mắt đến những bạn nguyên tắc cũng như cách điều khiển động cơ bước dùng Arduino và A4988 driver. Các bạn cần chọn mua loại sản phẩm tại địa chỉ uy tín cũng như quan tâm đọc thật kỹ những thông số kỹ thuật của chúng trước khi sử dụng nhé .
Nội Dung Có Thể Bạn Quan Tâm:
Source: https://baoduongdieuhoa24h.com
Category: Điện Tử