Động Cơ Giảm Tốc Encoder: Cấu Tạo, Nguyên Lý Hoạt Động, Mạch Điều Khiển Motor Encoder
1. Động cơ giảm tốc encoder là gì?
Động cơ giảm tốc encoder ( Rotary encoder ) là tên tiếng Anh để chỉ 1 loại động cơ con quay được tích hợp vào trong mạng lưới hệ thống tự động hóa nhằm mục đích mục tiêu tạo tín hiệu xung trong việc điều khiển vận tốc động cơ máy móc, thiết bị, trong khi đang quản lý và vận hành .
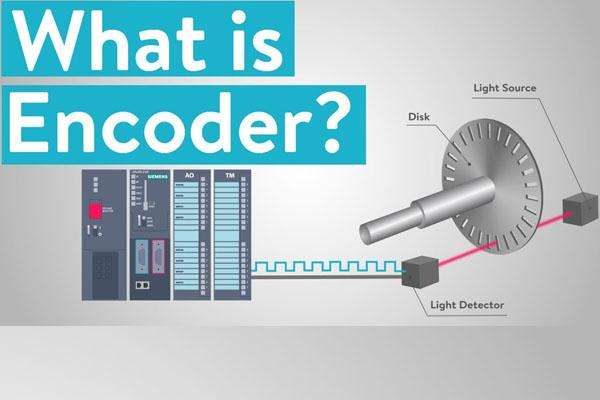
Rotary encoder là gì? Ứng dụng của encoder trong các lĩnh vực sản xuất
Thông thường, người ta hay gọi động cơ encoder là Rotary Encoder hoặc đơn thuần là encoder. Nhưng ngoài những, động cơ encoder còn được gọi bằng những tên khác như Linear Encoder hay Quadrature Encoder. Mặc dù vậy, mục tiêu chính của những dòng động cơ encoder chính là mã hóa được số vòng xoay nhằm mục đích mục tiêu tạo tín hiệu xung hình vuông vắn trong suốt quy trình điều khiển .Dựa trên tín hiệu nhận được ở dạng nhị phân thì những động cơ encoder hoàn toàn có thể tương hỗ hoán đổi cho nhau những vị trí góc hoặc vị trí thẳng tùy theo nhu yếu của người sử dụng .
2. Cấu tạo motor encoder
Các dòng động cơ encoder có cấu trúc khá đơn thuần, chỉ gồm có 1 thanh đĩa inox tròn gắn vào 1 cái trục quay, giống như hình dưới đây. Trong đó còn có 2 cái đèn led dạng thu phát cùng với lớp boar mạch để nghiên cứu và phân tích và giải quyết và xử lý tài liệu .
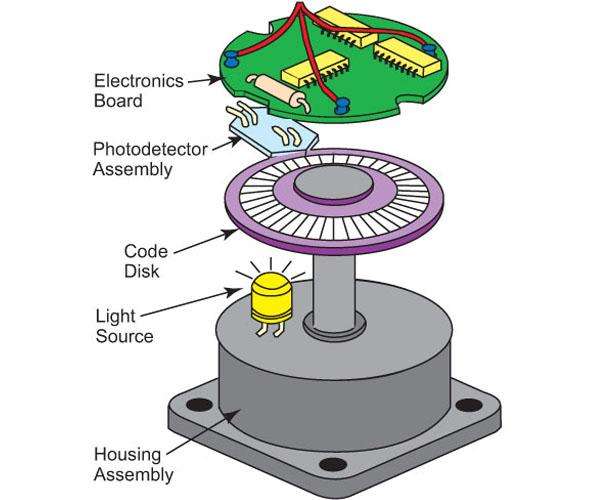
Các dòng động cơ encoder có cấu trúc khá đơn thuần
3. Nguyên lý làm việc của động cơ encoder
Encoder hoạt động giải trí theo nguyên tắc đó là khi ta phân phối nguồn điện cho nó thì những trục quay sẽ hoạt động giải trí. Đồng thời, hoạt động sẽ tạo cho đĩa tròn được xoay vòng. Khi đã xoay thì nó sẽ kéo theo đèn led sáng. Tất nhiên, trên phần đĩa tròn xoay thường có lỗ và những lỗ này sẽ xen kẽ với nhau .Dựa vào đó, bộ giải quyết và xử lý vi board mạch của động cơ sẽ đếm những lượt quay bằng cách chiếu đèn xuyên qua lỗ hoặc sử dụng một con bắt tích hợp trong đó để báo tín hiệu về. Chính vì thế, những xung dạng vuông được tạo ra và đếm được đơn cử trải qua độ cắt ánh sáng bắt nguồn từ đèn led trải qua những lỗ hổng trên .Trong quy trình hoạt động giải trí, tín hiệu xung dạng vuông hoàn toàn có thể tăng hoặc giảm theo nhu yếu. Bên cạnh đó, nếu ở gần những động cơ lớn hoặc những biến tần sẽ gây ra thực trạng tín hiệu nhiễu xung, từ đó gây mất độ đúng mực cho động cơ encoder trong khi hoạt động giải trí .Có thể Tóm lại được rằng, động cơ encoder có trách nhiệm tạo ra những điểm xung dạng vuông ở trên đồ thị và những góc xung dạng vuông này sẽ lệch nhau 1 góc là 90 độ C. Từ 2 tín hiệu lệch góc đó, tất cả chúng ta sẽ thực thi xác định hướng và vị trí quay của động cơ servo motor .
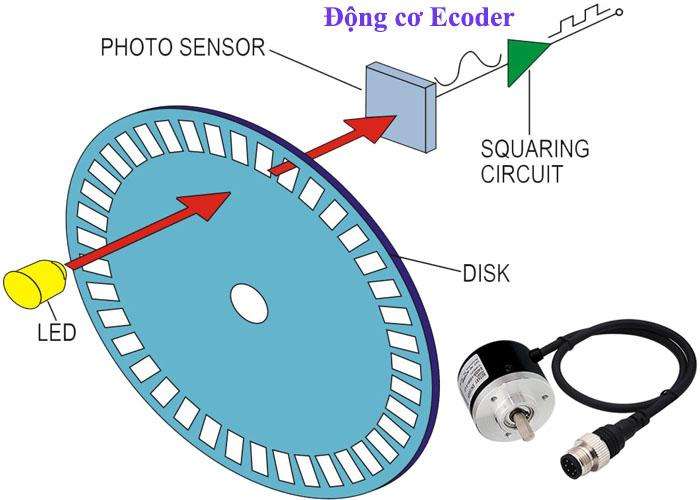
Sơ đồ nguyên tắc thao tác động cơ encoder
4. Ứng dụng động cơ encoder
Trong nghành nghề dịch vụ kiến thiết, cắt tỉa : Động cơ encoder có trách nhiệm quan trọng so với việc xác lập vị trí cắt và tạo góc đem lại độ đúng mực gần như là 100 %. Chính cho nên vì thế, việc khoan lỗ hoặc cắt sắt thép cũng như uốn cong những loại sắt thép được chuẩn xác là nhờ vào sự hiệu chỉnh từ động cơ này .Bên cạnh đó, hiệu quả còn phụ thuộc vào vào sự hiệu chỉnh đến từ con biến trở có dạng xi lanh. Mà muốn hiệu chỉnh được con biến trở một cách đúng chuẩn thì tất cả chúng ta phải quy đổi biến trở ra thành 4 20 mA để đưa về PLC lập trình .Trong những cần cẩu dùng để sắp xếp sản phẩm & hàng hóa tại những nhà hàng lớn như Metro cũng có sự góp mặt của động cơ bước và động cơ encoder. Nó làm trách nhiệm xác lập đúng mực vị trí cần đặt lô hàng để cho chiếc máy cẩu xúc hàng triển khai chuyển lên vị trí đó .Tuy nhiên, để tạo được độ chuẩn xác cao nhất, ngoài sự linh động của những dòng động cơ encoder thì người ta còn phải dựa vào kinh nghiệm tay nghề cũng như sự khôn khéo của người dùng .
Trong các dây chuyền để sản xuất bánh kẹo: Hầu hết các loại bánh kẹo cùng một loại thường sẽ có kích thước và kiểu dáng hoàn toàn giống như nhau. Đây cũng chính nhờ vào công dụng của động cơ encoder trong các servo motor.

Ứng dụng xác lập vị trí của động cơ encoder trên thanh trượt
5. Các loại động cơ encoder phổ biến
Xét về những ứng dụng đơn cử trong thực tiễn thì dòng encoder được những nhà phân phối phân loại thành khá nhiều, ví dụ điển hình như :
- Encoder xoay: Hoạt động dựa vào sự điều chỉnh núm vặn của nó.
- Encoder thẳng: Hoạt động chạy trên 1 thanh trượt dài và thẳng, thường được sử dụng trong các loại máy in, máy photocopy.
- Encoder từ trường: Hoạt động dựa trên từ trường của các thanh nam châm vĩnh cửu có khả năng làm xoay chuyển nó.
Xét về công dụng và vận tốc thì phân loại thành 2 loại :
- Encoder hoạt động căn cứ vào bộ mã hóa nhị phân 0 1 đã được mặc định sẵn.
- Encoder hoạt động dựa theo chu kỳ hoặc có thể đẩy nhanh tiến độ theo tín hiệu của xung phát ra. Cũng có thể giảm dần tiến độ tùy thuộc vào mong muốn của người dùng.
6. Cách xác định sự thay đổi của encoder
Điểm chung của toàn bộ những dòng encoder chính là ship hàng trong việc mã hóa ở dạng 0 và 1. Mã hóa này dựa theo 2 kiểu là ( A, B ) hoặc ( A, B, Z ). Ở phần này, A và B sẽ tiếp đón trách nhiệm truyền tải tài liệu theo cơ cấu tổ chức đóng / mở ( on / off ). và độ lệch của A, B trong khoảng chừng một góc 90 độ .Bên cạnh đó, Z chính là đơn vị chức năng chuẩn được tính là 1 chu kỳ luân hồi quay vòng của động cơ encoder. Chính vì vậy, để xác lập được đơn cử hướng chuyển dời của thiết bị đóng cắt nguồn điện thì tất cả chúng ta phải nắm rõ được 2 điểm đó là A và B, đồng thời biết được sự biến hóa trạng thái ra làm sao của điểm A, B .
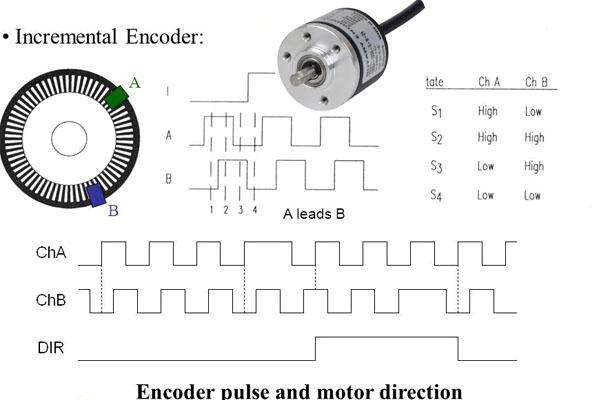
Tín hiệu xung từ động cơ encoder biểu lộ ở dạng xung vuôngLưu ý : Sự biến hóa đồng thời của A / B trên tổng số 1 vòng xoay sẽ được biểu lộ bằng tín hiệu xung dạng vuông hoặc vòng xoay. Từ 2 điểm là A : 0 / B : 1, tất cả chúng ta có hệ dạng nhị phân nhằm mục đích biểu lộ được sự biến hóa trạng thái của 2 điểm A và B lúc này trong cùng 1 chu kỳ luân hồi, đó là những trạng thái : 00 ( AA ), 01 ( AB ), 11 ( BB ), 10 ( BA ). Nắm bắt được những triết lý cơ bản này sẽ giúp những bạn lý giải được nhiều “ bài toán khó ” về điều khiển động cơ .
a) Xác định encoder thay đổi
Chúng ta chỉ cần quan tâm xác lập được tần số xung thực tiễn của một động cơ encoder, tức là phải xác lập được sự đổi khác của nó. Ví dụ như : Giả sử, có một động cơ encoder đang có tần số xung vào khoảng chừng tầm 150 ppr thì lập tức ta hoàn toàn có thể quy đổi được thành 600 sự đổi khác của 2 bit là A và B. Dưới đây biểu lộ 3 cách biến hóa của động cơ encoder dựa theo ví dụ trên :
- Phương pháp 1: Xác định được trạng thái tốc độ và số vòng quay của con encoder thể hiện sự tăng giảm trong 1 chu kỳ. Với cách này, chúng ta có thể dự toán được chính xác số lần thay đổi của 1 loại động cơ encoder nhất định. Sau đó, bạn chỉ cần nhân đôi con số đó lên vì nó tồn tại 2 dạng là vòng quay thuận và vòng quay ngược. Với phương pháp này, chúng ta sẽ lọc được tới 150 vị trí thay đổi của A hoặc B.
- Phương pháp 2: Thay vì chỉ áp dụng phương pháp theo dõi sự thay đổi của 1 trong 2 kênh là A và B thì chúng ta lại theo dõi cùng một lúc 2 kênh A/ B theo phương pháp tăng giảm trên. Kết quả thu được cũng là 600 trị trí A/ B có sự thay đổi trong suốt thời gian 1 chu kỳ hoàn thiện.
b) Cách đưa tín hiệu xung về PLC
Để những bộ lập trình PLC đọc được tín hiệu truyền tải về từ những loại động cơ encoder thì bắt buộc tất cả chúng ta sẽ phải sử dụng 1 thiết bị làm trung gian nhằm mục đích mục tiêu là nhận tín hiệu xung dạng vuông từ encoder. Sau đó, thực thi quy đổi chúng thành tín hiệu analog để hoàn toàn có thể đưa về PLC lập trình để hiệu chuẩn .
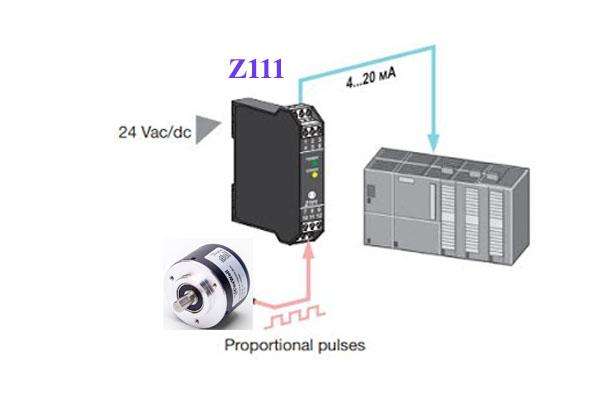
Bộ chuyển đổi tín hiệu xung dạng vuông từ encoder ra 420MA
7. Điều khiển tốc độ động cơ encoder bằng bằng PID
Khi cấp điện mạng lưới hệ thống thực thi hoạt động giải trí, vi điều khiển sẽ hiển thị những thông tin khởi đầu, động cơ lúc này dừng hoạt động giải trí. Do đó, vi điều khiển sẽ phải chờ tín hiệu chạy từ nút nhấn để gửi vào .Khi nhận được tín hiệu từ vi điều khiển để cho phép động cơ quay dừng quay thuận quay nghịch quay nhanh / chậm, … còn tùy theo nhu yếu của người sử dụng. Sau đó, thực thi đọc tín hiệu xung để gửi về cho mạch vi điều khiển để xử lý tính toán vận tốc cho động cơ. Sau đó tất cả chúng ta sẽ dùng chiêu thức đo lường và thống kê PID để hoàn toàn có thể bù lại được giá trị khi thực thi setup nhằm mục đích giúp cho động cơ hoạt động giải trí được không thay đổi hơn .
Ngoài ra, nếu động cơ encoder bị giữ lại hoặc phải kéo băng tải nặng hơn thì cần phải có vi điều khiển dùng PID để có thể kích được dữ liệu và bù lại tốc độ đang bị hao hụt. Đồng thời, màn hình LCD 16 × 2 sẽ hiển thị những thông tin vừa được nhấn tùy thuộc vào từng trường hợp cụ thể.
Kết luận
Động cơ encoder có thể sử dụng mạch cầu H hoặc hệ điều khiển Module L298 để điều khiển tốc độ nhanh/ chậm, chiều thuận/ nghịch theo ý muốn của người dùng. Sử dụng các bộ vi điều khiển, chẳng hạn như PIC, 8051, AVR, Arduino,… để điều khiển tốc độ cho động cơ bằng PWM kết hợp với PID sẽ có tác dụng bù lại phần tốc độ đã bị suy hao trong suốt quá trình hoạt động của hệ thống. Chính vì vậy, động cơ encoder hiện nay có nhiều chủng loại và được sử dụng vô cùng rộng rãi để phục vụ nhu cầu của con người trong từng công việc.
Nội Dung Có Thể Bạn Quan Tâm:
Source: https://baoduongdieuhoa24h.com
Category: Điện Tử